行业应用

400-888-5135
3nh@3nh.com
显微高光谱成像系统在临床医学、生物学、材料学、微电子学等领域具有广泛应用。很多用户这种设备也比较好奇,本文简单介绍了显微高光谱成像系统的成像原理和结构设计。

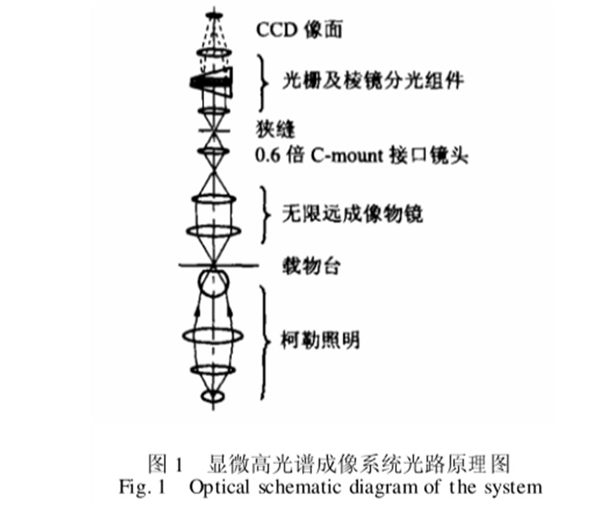
显微高光谱成像实验系统基于推帚式成像光谱仪的原理进行设计,光路原理图如图所示。
处于显微镜载物台上的样品被柯勒照明系统照明,瞬时视场内的样品条带通过显微镜物镜和0.6倍CMount接口镜头成像于分光计的狭缝处,再经过光谱分光组件后,在垂直样品条带方向按光谱色散,最后成像于CCD像面。
CCD光敏面平行于狭缝的一维称为空间维,垂直于狭缝的一维称为光谱维,空间维每一行光敏元上得到的是样品条带一个光谱波段的像,这样面阵CCD相机每帧图像便对应于一个样品条带的多光谱图像。通过载物台自动装置对样品进行推扫,就得到整个样品的二维图像及光谱数据,即图像立方体。
整个系统由显微镜、分光计、面阵CCD相机、载物台自动装置以及数据采集与控制模块等几部分组成。系统的光谱范围从400nm到800nm,120个波段,光谱分辨率优于5nm,空间分辨率大约1μm。不仅能够提供微小物体在可见光范围的单波段显微图像,而且能够获得图像中任一像素的光谱曲线,实现了光谱技术和显微成像技术的结合,在微观领域有着广泛的应用。
1. 总体结构设计
由于显微镜是带有光源的主动光学系统,因此,为了获得成像光谱,从总体上考虑,有两种系统结构可供选择:
一种是在前光学系统进行光谱分光,即采用波长调谐的照明光源,照明光源以一定的波长间隔连续或非连续地扫描,在每一个预定的波长处得到一个灰度图像,波长扫描后便构成光谱图像立方体。这种方法的主要优点是不用在成像光路中插入任何光学和机械元件,因而不会增加额外的光学像差。缺点是很费时,对于上百个波段的高光谱成像而言,往往需要长达小时量级的时间。而且,这种方法不适用于荧光应用,因为要得到荧光需要激发光源。
另一种结构是在后光学系统(即成像光束)中进行光谱分光,这是用于航空航天遥感领域的光谱成像仪中广泛采用的方法,对于显微高光谱成像系统,这种方案也可以借鉴。
因此,本显微高光谱成像实验系统采用后一种结构形式,即在成像光束中进行光谱分光。利用推帚式光谱成像仪的原理进行设计,将光谱仪子系统光学耦合到生物显微镜的三目镜筒上;利用高精度步进电机驱动载物台进行微米级平动,实现推帚成像。
整个系统在结构上主要由显微镜、分光计、CCD相机、数据采集和控制系统几部分组成。
2. 分光子系统设计
目前,用于成像光谱仪器的光谱分光方法主要有棱镜分光、光栅分光、傅里叶变换、声光可调谐滤光片、液晶可调谐滤光片、渐变滤光片、二元光学元件等方法。从目前的应用情况来看,光栅分光仍是应用广泛而且技术相对成熟的光谱分光方法。因此,本系统仍采用传统的光栅分光方法。而对于光栅而言,又可分为反射光栅和透射光栅。由于该系统属于直视系统,即同轴光学系统,因此,若采用反射光栅,将使系统的光轴发生折转,从而给系统结构设计带来困难。为简化设计,本系统采用透射光栅分光。
对于透射光栅,根据光栅方程,当垂直光栅入射,即入射角为零时,若取+1级或-1级衍射光谱,则衍射角不为零,即所有衍射光线将沿系统主光轴发生偏转,从而造成整个系统为非同轴系统。因此,为了使整个系统保持为同轴光学系统,采用棱镜-光-棱镜组合的分光方式,使分光后中心波长的衍射光线沿系统主光轴衍射。光谱分光系统的主要设计参数如下:
狭缝:宽度25um,有效长度8.8mm;准直光学镜头:f=40mm,f/2.8;会聚光学镜头:f=40mm,f/2.8,与准直光学镜头为对称式结构;光栅频率:3151/mm;前棱镜:顶角11.8?,上宽度2.4mm,下宽度5.8mm,中心厚度4.1mm;后棱镜:顶角11.2?,上宽度1.0mm,下宽度5.5mm,中心厚度3.2mm。
3. 载物台自动装置设计
根据推帚式成像光谱仪的特点,系统使用狭缝作为视场光阑,对瞬时视场内的
观测目标进行一维采样,因此,要获得整个观测目标的二维图像,必须对另一维进行推帚。用于航空遥感的推帚式成像光谱仪是借助飞机的向前运动来完成推帚的,与之不同的是,显微高光谱成像系统是利用载物台的平动来实现对样品的推帚成像,因此该实验系统需要设计和研制载物台自动装置。为了获得准确的光谱图像,必须对载物台的运动速度进行精确的控制。本系统利用步进电机连接滚珠丝杠,将滚珠丝杠的移动横梁连接到载物台,来驱动载物台运动。因此,载物台的运动速度是通过对步进电机的转速控制来实现的。而步进电机的转速控制是通过单片机产生方波脉冲信号来触发步进电机进行步进旋转。因此,单片机产生的方波脉冲信号频率最终决定了载物台的运动速度。
系统的瞬时视场与系统的总放大倍数和CCD光谱维像元尺寸有关。在该系统中,CCD光谱维像元大小为27um,当使用40倍物镜时,系统的总放大倍数为40?.6=24倍。因此,系统在光谱维方向的空间分辨率为27/24=1.125um,而相机的帧速率为30帧/秒,所以,载物台的运动速度为1.125?0=33.75um/s。由于丝杠的螺纹间距为1mm,即1000um,步进电机的每转步数为10000步/转,因此,步进电机每旋转一步对应载物台的前进距离为1000/10000=0.1um,最后计算出电机的运行频率为33.75/0.1=337.5Hz,即需要产生的方波脉冲的周期为2963μs。
4. 数据采集子系统
数据采集系统主要包括高光谱结果数据传输、采集、控制、存储和实时显示等功能,由于高光谱成像系统的数据传输速率非常高,因此传统的基于ISA、EISA总线的数据采集系统已不能满足要求。而PCI总线的最大数据传输速率为132
MB/s,能满足高光谱成像系统数据采集的要求。所以,本系统采用PCI总线作为数据采集的微机接口。
数据采集系统采用模块化设计方法,将各个主要功能模块分离开来,模块间采用统一的接口进行通信;并且在数字逻辑实现上,采用在系统可编程(In System Program)器件,通过软件对系统进行配置,提高系统的灵活性。其具体设计方法与其他高光谱成像仪器的数据采集系统类似。